



新闻中心 分类>>

 2023-12-04 22:50:41
2023-12-04 22:50:41  作者:
作者:  返回列表
返回列表原标题:未来机器人C位首秀!全球首个VGV混合装卸车计划|CeMAT ASIA 2020
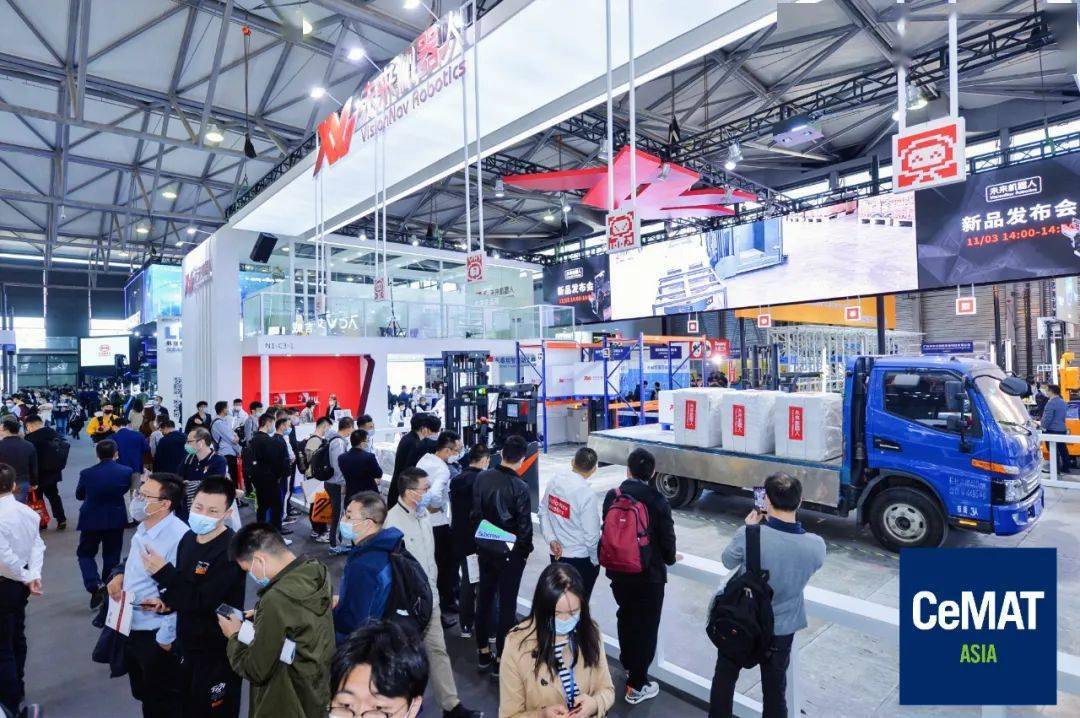
物流无人化的需求逐年攀升,但其进程仍面对许多中心场景的应战。CeMAT ASIA 2020,打破物流中心场景,完成才智物流全面化,未来机器人带着新计划和新品高调露脸CeMAT展台,招引了现场许多同职业者、参展观众以及媒体的重视。
11月3日上午的新品发布会上,未来机器人展台热闹非凡,许多观众和干流媒体前来展台观赏,见证了未来机器人立异新计划/新品的发布,整场发布线上进行同步直播。未来机器人CEO李陆洋博士到会发布会,在致词中说道:“未来机器人自成立起就一向专心于无人叉车的研制,让无人叉车主动去习惯任何物流场景,这要求咱们不断地在技能和场景了解度上做出打破,不断的进步工业无人车辆在杂乱刚需物流场景下的感知和运动控制才能,这是一件极富应战性的作业。此次出现给咱们的新计划——24小时外月台双侧无人扮装卸车,是未来机器人又一中心场景的打破,是咱们独有的老练装卸车无人化解决计划,在很多客户现场中已成功交给。”
随后而来的新计划/新品的精彩解说与演示,将视觉技能和工业无人车辆的结合演绎到极致,让人眼前一亮。

月台装卸作业对物流功率有很大影响,企业的主动扮装卸需求也在日益上升,但是该场景下的无人化晋级受限于其场景杂乱性与无人化技能使用水平,长期以来都是国内物流职业难以打破的课题。
未来机器人此次展现的外月台装卸车计划,具有双车、双流程、随机位等特征,两款视觉导航平衡重式无人叉车一起在卡车两边进行装车使命,夹抱与叉取两种方法一起出现,卡车位的随机性更是大大复原了装卸车现场的实在的状况,是公司三大视觉技能强项:感知/定位/伺服的集大成者。

在现场为宾客解说计划的未来机器人销售部总监邹先生说道:“外月台装卸车计划,是咱们继中高位出入库、线边转运之后的又一中心场景打破,在已交给的客户使用事例中,咱们的计划基本上不要求改动现场,能够将货品主动运送到卡车里并在车厢内堆放摆放规整,完成拆垛、装车、堆放全过程的无人化、信息化和智能化,包含90%的盛行卡车车型,包含货柜车、平板车和飞翼车,与装卸车场景结合的深度现在在职业界极具竞争力和领创性。”
新计划中双车作业相同引人重视,怎么样做多车混合调度、即时呼应更新后的使命指令、主动感知随机位精准地进行夹抱叉取操作等,都对无人叉车智能化程度、作业精度的高难度应战,未来机器人的无人叉车做出了美丽的平衡决议计划,完成了一系列主动化操作。
此次发布会正式出面的两款新品无人叉车,丰厚了未来机器人无人叉车产品图谱,进步了为客户发明更为柔性、精准、智能无人化解决计划的才能。
配备夹抱属具的平衡重式无人叉车VGV,未来机器人无人驾驭工业车辆的又一力作!举升6m,承重0.8T(叉臂版为1.5T),速度1.5m/s,该车能够配备多种不同属具(叉臂、夹抱等),各种配备齐上阵,适配不一样的物料,发挥一车的最大价值。
统筹无人叉车功能与更高敏捷性,举升1.6m,承重1.4T,速度1.5m/s,SLIML14-02这款VGV能够在2m窄通道进行出入库作业,适用于高密度仓储物流环境。不像传统叉车那样进行本体改造,SLIM从整体式叉车的理念动身,咱们一开始就去掉了驾驭位,流线型纤薄车身,运作更灵敏高效。

展会的第一天,未来机器人展台就现已热度爆棚,而后续更精彩活动也将在这儿打开。11月3日-11月6日,咱们在N1馆 C3-1展台等您,欢迎前来一起讨论物流无人化科技,想象才智物流的美好未来!回来搜狐,检查更加多
 友情链接:
友情链接:






